Jun Zeng (曾俊)
I am passionate about building robotic systems and developing algorithms that enable intelligent decision-making and agile responses in complex, dynamic environments. I focus on translating cutting-edge research into real-world applications with a mission-driven mindset. My work combines methodologies from motion planning, trajectory generation, and machine/deep learning for a wide range of robotics applications. Currently, I am working at Cruise, where I develop autonomy algorithms for self-driving vehicles.
Prior to this, I pursued my Ph.D. in the Hybrid Robotics Group, under the supervision of Professor Koushil Sreenath at the University of California, Berkeley. My research focused on model-based optimization and learning methods for robotic systems, with applications across various platforms, including aerial and legged robots. Before joining UC Berkeley, I earned a Diplôme d'Ingénieur from École Polytechnique in June 2017, and a B.S.E. in Mechanical Engineering and Automation from Shanghai Jiao Tong University (SJTU) in June 2016. I have also completed internships at Waymo, PlusAI, and Valeo.
Email / Google Scholar / GitHub / LinkedIn / Twitter
Selected Publications
See latest publications on my Google Scholar page.Legged Robots & Humanoids

Control, Optimization & Formal Methods
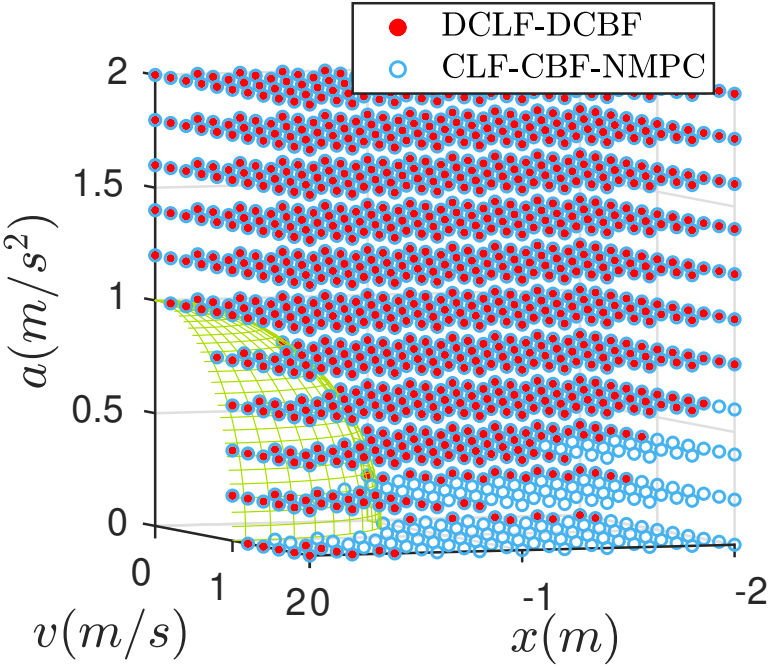
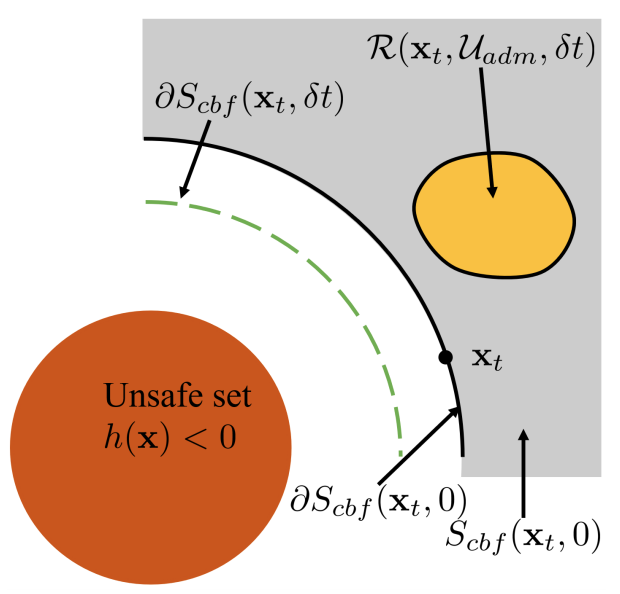
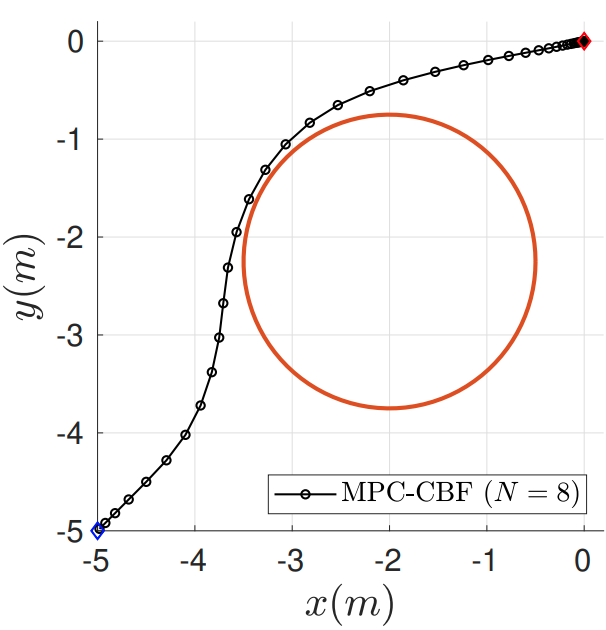
Safety-Critical Model Predictive Control with Discrete-Time Control Barrier Function
Jun Zeng*, Bike Zhang*, Koushil Sreenath
IEEE American Control Conference (ACC), 2021
Publisher /
ArXiv /
GitHub /
NorCal Control Workshop
Awards & Honors
- Chin Leung Shui Chun Fellowship, UC Berkeley, 2021
- Graduate Division Block Fellowship, UC Berkeley, 2020-2021
- Mechanical Engineering Department Award, UC Berkeley, 2020
- X Fondation Fellowship, Ecole Polytechnique, 2015-2017
- Ardian Excellence Scholarship, SJTU, 2014
Professional Activities
Teaching
- EECS106B/206B - Robotic Manipulation and Interaction (Spring 2020)
- EECS106A/206A - Introduction to Robotics (Fall 2019)
Peer Reviews
- Robotics Journal / Conferecen Reviewer: IJRR, TR-O, Auto. Robots, RA-L, ICRA, IROS.
- AI Journal / Conference Reviewer: CoRL, AAAI, NeurIPS, ICML, ICLR.
- Control Journal / Conference Reviewer: TAC, Automatica, T-CST, T-CNS, L-CSS, J. Dyn. Sys., Meas., Control, ACC, CDC, ICUAS.